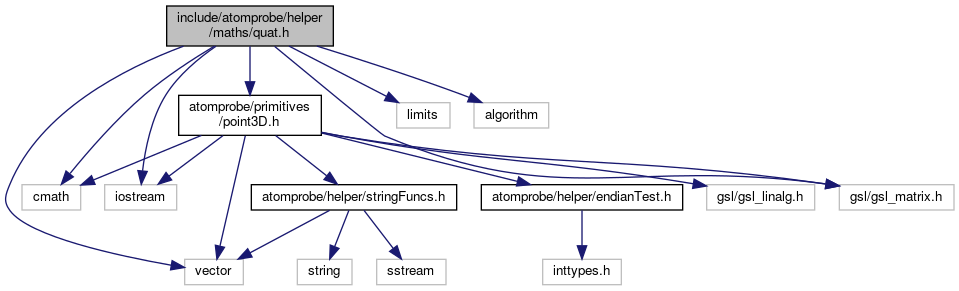
#include <cmath>#include <limits>#include <iostream>#include <vector>#include <algorithm>#include <gsl/gsl_matrix.h>#include "atomprobe/primitives/point3D.h"
Include dependency graph for quat.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | AtomProbe::Quaternion |
| Data storage structure for quaternions. More... | |
| struct | AtomProbe::Point3f |
| Data storage structure for points. More... | |
Namespaces | |
| AtomProbe | |
Functions | |
| void | AtomProbe::quat_rot (Point3D &p, const Point3D &r, float angle) |
| Rotate a point around a given rotation axis by a specified angle. More... | |
| void | AtomProbe::quat_rot (Point3f *point, const Point3f *rotVec, float angle) |
| Rotate a point around a given vector, with specified angle. More... | |
| void | AtomProbe::quat_rot_array (Point3f *point, unsigned int n, const Point3f *rotVec, float angle) |
| Rotate each point in array of size n around a given vector, with specified angle. More... | |
| void | AtomProbe::quat_rot_array (Point3D *point, unsigned int n, const Point3f *rotVec, float angle) |
| Rotate each point in array of size n around a given vector, with specified angle. More... | |
| void | AtomProbe::quat_get_rot_quat (const Point3f *rotVec, float angle, Quaternion *rotQuat) |
| Compute the quaternion for specified rotation. More... | |
| void | AtomProbe::quat_rot_apply_quat (Point3f *point, const Quaternion *rotQuat) |
| Use previously generated quats from quat_get_rot_quats to rotate a point. More... | |
